Location: Carnegie Mellon D-Fab Lab, Pittsburgh, PA
Class: Rob|Fab: Material Affordance in Digital Design
Date: Spring 2013, 4th year
Duration: 2 months
Instructor: Joshua Bard
Collaborators: Matt Adler
This project was done almost entirely with HAL Robot Control by Thibault Schwartz, a plug-in for grasshopper that allows easy and precise control over toolpath generation among other things. You can download it here: http://hal.thibaultschwartz.com/
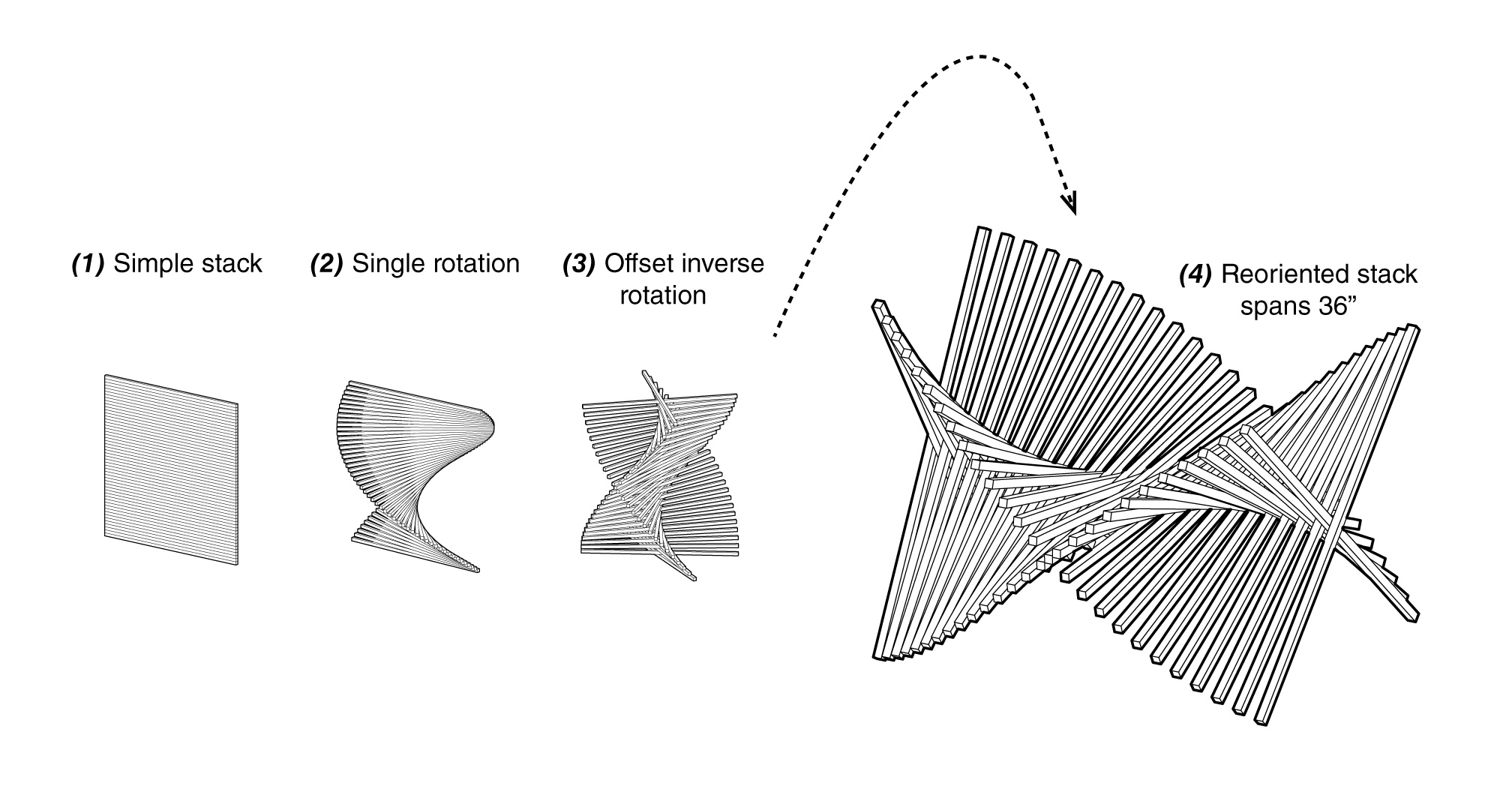
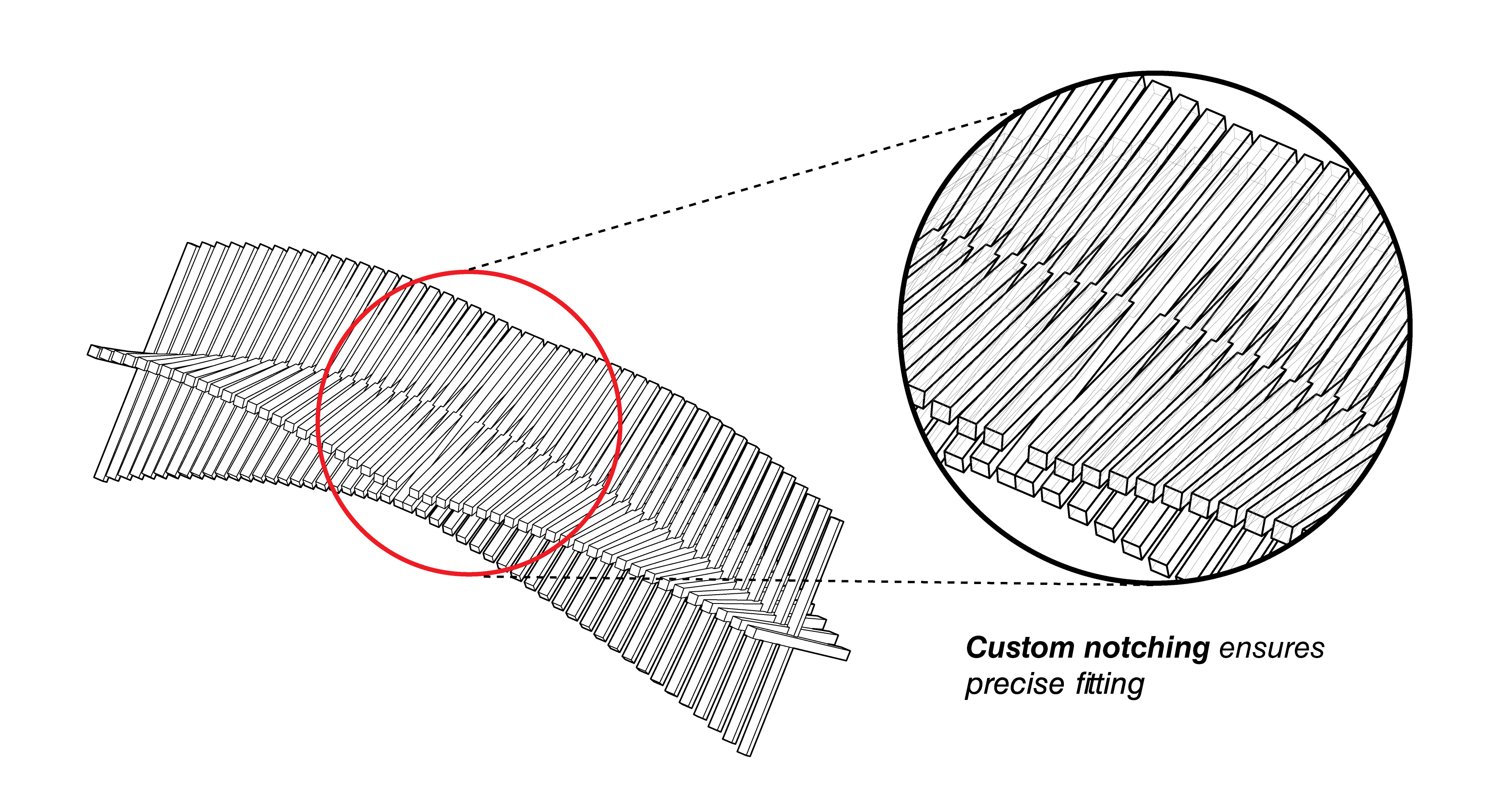
Design Process

Assembly Sequence
Final Assembly
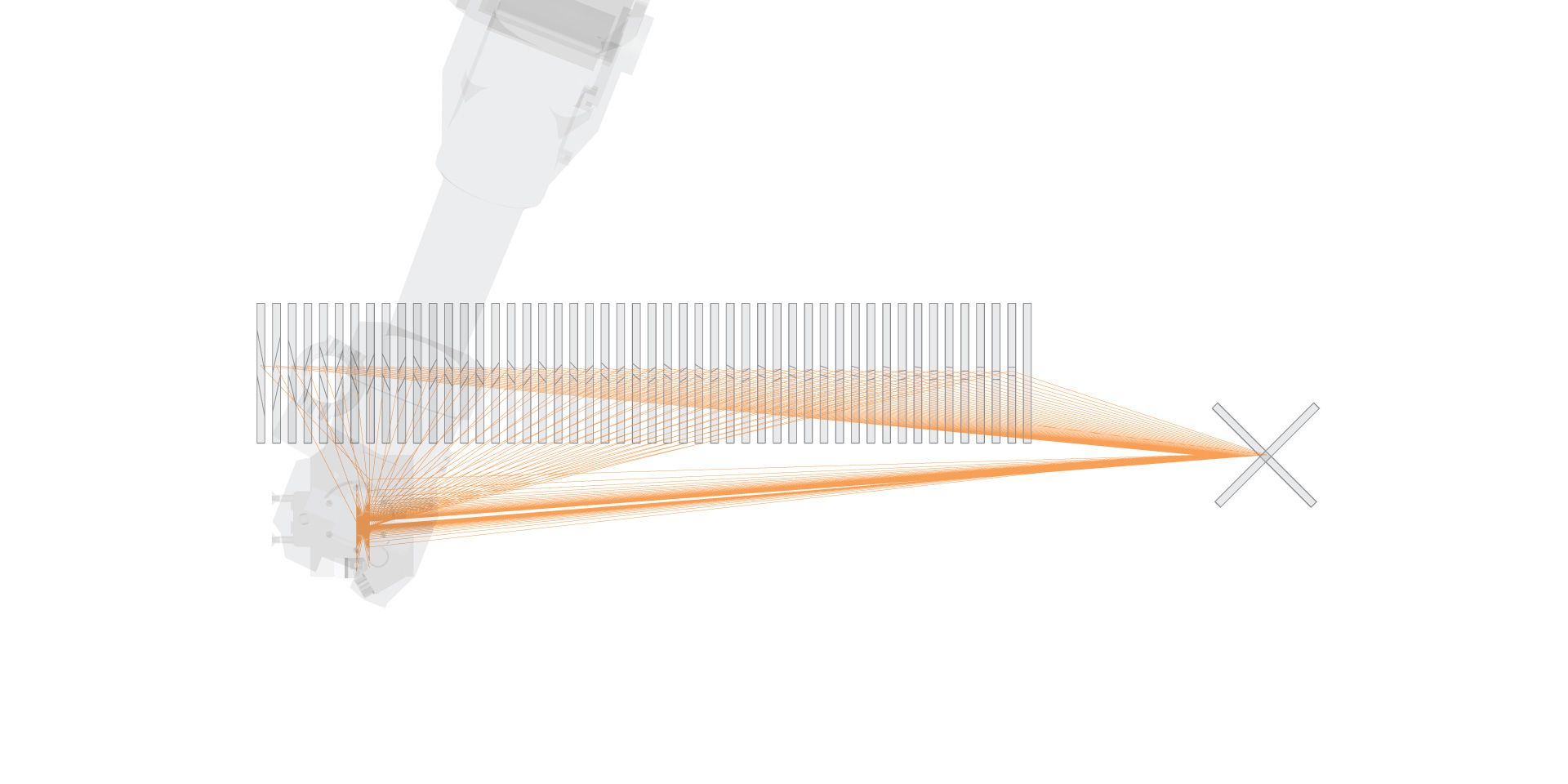
Toolpath
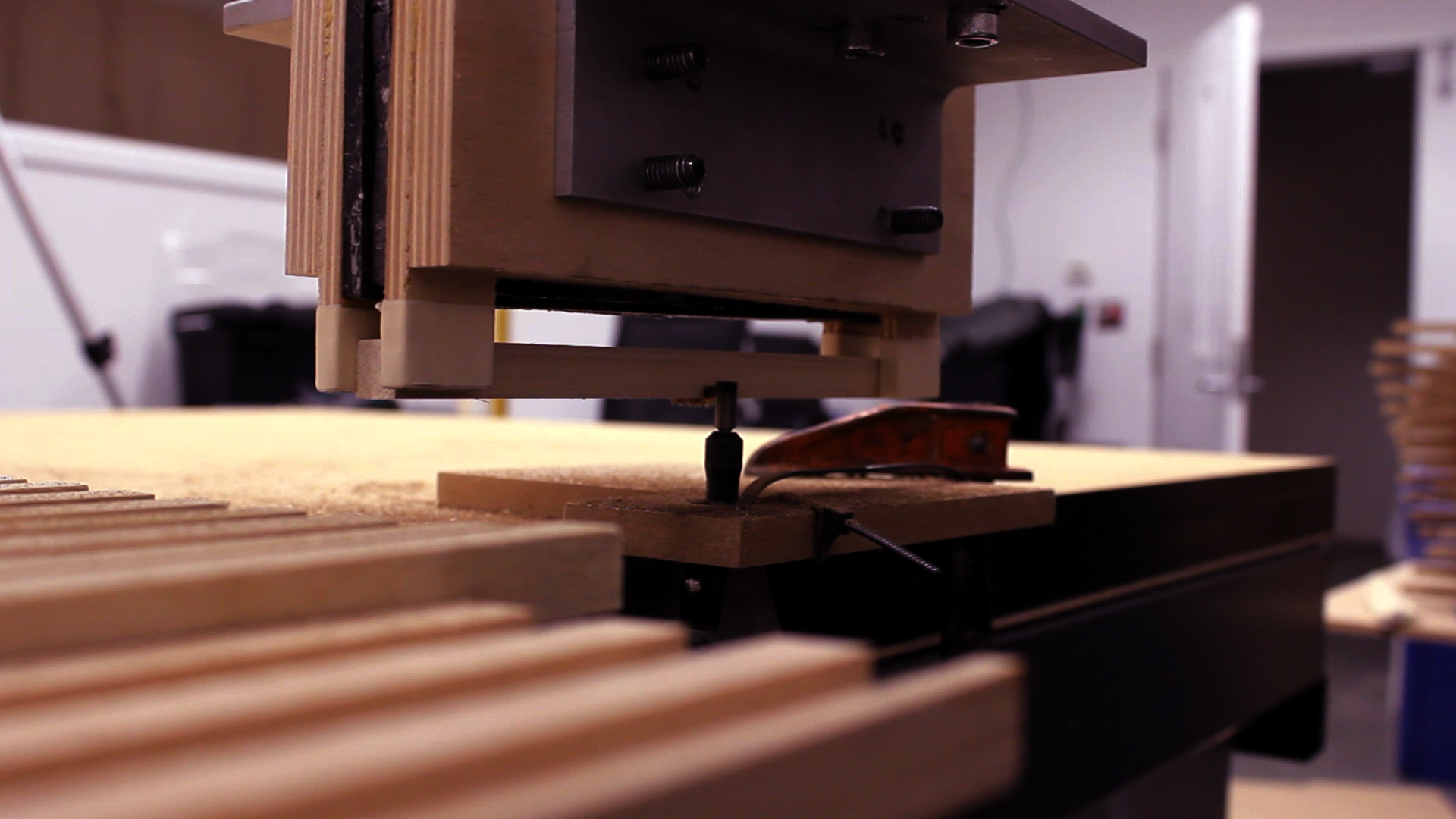
Notch Cutting with Dremel
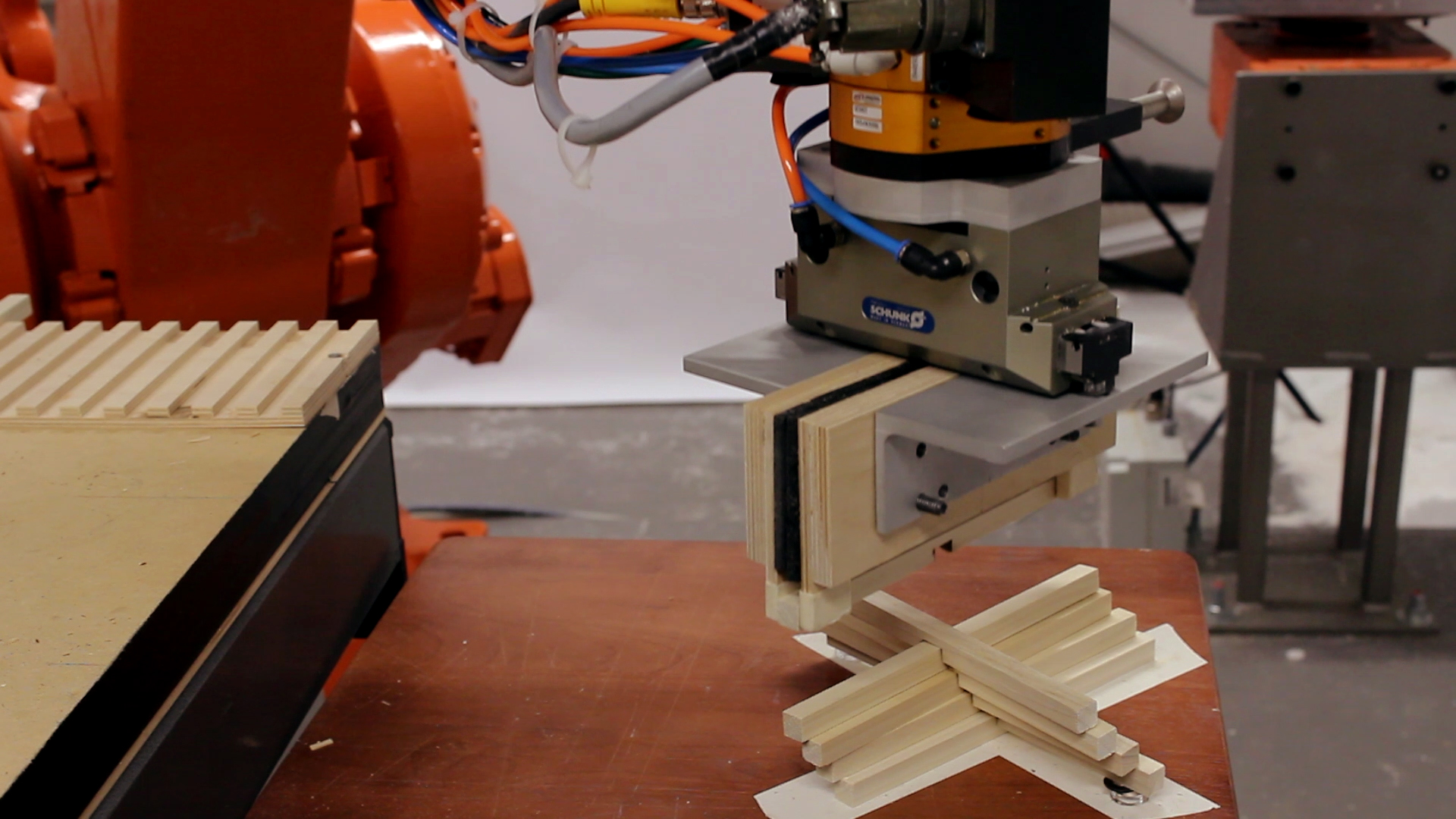
Stacking with Gripper Toolhead
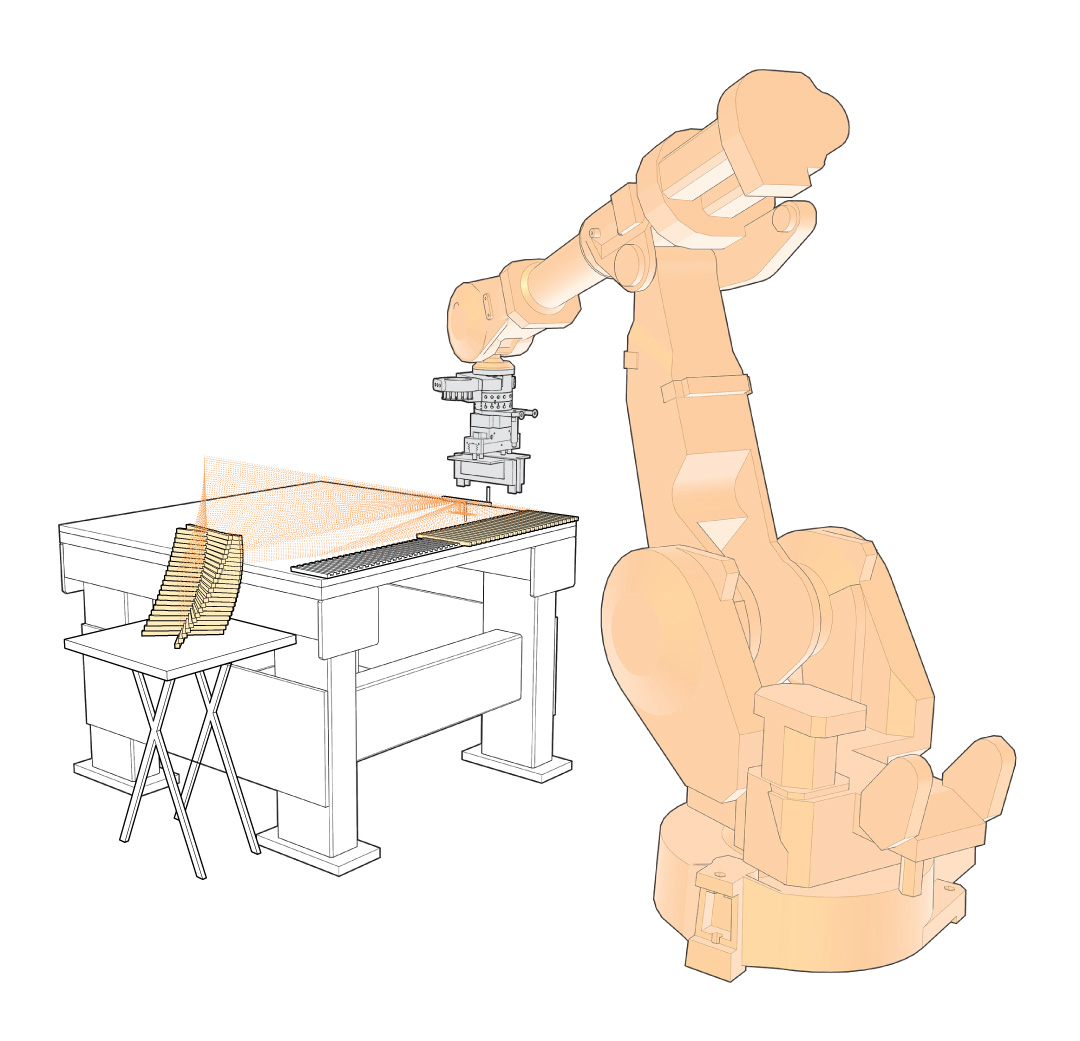
ABB 4400 6-Axis Robot
StickStack
- Categories →
- Robotics
-

Quelea: agent-based design for Grasshopper

-

HealthCat
-

123D Heal+
-

Embodied Computation: Exploring Roboforming for the Mass-Customization of Architectural Components
-

Particle Wave Cabinet
-

Spatial Layout Solver
-

StickStack
-

Rivulet
-

Tiltshift
-

Tangible Input Table
-

School for Urban Agriculture
-

petBOT – Animal Enrichment
-

Miller Gallery reEntry – Flexible Facade
-

EcoSkin – Environmental Center
-

Zip – Catenary Structure
-

Boston Dance Center